模糊自适应PID控制的异步电动机软启动器研究
 来源:未知
发布日期:2019-09-17 17:27【大 中 小】
来源:未知
发布日期:2019-09-17 17:27【大 中 小】
异步电动机的在启动瞬间的启动转矩会造成较大 的机械冲击,影响电机及其拖动设备的使用寿命,启动 电流过大也会加速电动机老化,影响电网的供电和其他 设备运行。随着工程机械的不断更新和发展,对电动机 的启动性能要求越来越高,如:启动电流应尽可能小; 启动转矩足够大且能平稳上升;启动过程的功耗应尽可 能少;设备运行安全可靠,操作简单等。模糊控制的思 想主要依靠的是人们来自于实践的经验知识,自适应 控制的控制过程的特点是它可以随时修正自己的自身特 性。将自适应控制策略运用到 PID 控制中,运用自适 应相关控制原理来调整 PID 控制过程中的参数,能够 自适应对未知系统或系统参数发生变化时所出现的一系 列问题。
1 三相异步电机特性分析
三相异步电机接入的是 380V 三相交流电源,电机 转子的转速与定子磁场的转速不同,存在转差率,三相 异步电机的机械特性与转差率如式(1):
(1) 式中:ω 为电机转速;J 为电机的转动惯量;Te 为电机的电磁转矩;s 为电机的转差率;nP 为电机的 极对数;ω1 为定子电源角速度;U1 为定子电源相电压; R2 为折算到定子侧的每相转子电阻;R1 为每相定子 电阻;L11 为每相定子漏感;L12 为折算到定子侧的每 相转子漏感;s 为转差率;n0 为磁场转速;n 为转子转速。
对于电机常用的软启动方法主要有:液态电阻软 启动;可控硅串联降压软启动;开关变压器软启动;温 控电阻软启动等。
2 模糊自适应 PID 控制原理
现实中的许多现象及关系比较模糊,如高与矮, 长与短,大与小,多与少,穷与富等。这类现象具有“亦 此亦彼”的模糊性。模糊 PID 的主要任务就是找出 PID 的 ∆kp,∆kl 和 ∆kd 三个参数与误差 e 和误差变化 ec 之 间的模糊关系。
模糊自适应 PID 控制以常规的 PID 控制为基础, 系统的输出量与用户设定的输入量之间的偏差e和两者 的偏差变化率 ec 作为模糊控制器的输入量。模糊控制 器的输出量是 ∆kp,∆kl 和 ∆kd。通过模糊控制器,根 据负载的实时特性由控制软件在线实时的调整模糊控制 器的三个输出量,就可调整 PID 控制器中的 kp、kl 和 kd 参数式中:Ti :积分时间常数;Td:微分时间常数。 控制系统响应的速度和调节的精度等控制指标与 kp 有关。当 kp 增大时,相应的控制指标也会随之増大 和上升。当设计时将 kp 设置的较大时,则控制系统在 运行过程中就会容易产生超调。如果 kp 过大的,控制系统的运行就会不稳定。相反,当 kp 的值变小时,相 应的控制指标会减小和下降。 参数 kl 可用来反映系统的稳态误差,可通过调节 kl 的大小来降低或消除系统的稳态误差。增大 kl 的值 可使系统的稳态的误差消除速度加快。若 kl 的值过大, 控制系统则会发生积分饱和现象,此时系统的响应的 过程就会产生较大的超调。如果在参数调整的过程中 kl 的值变得很小的话,则整个控制系统的调节会受到影响, 因为当 kl 的值很小时就很难去除系统的稳态误差。 参数 kd 的主要作用是改善控制系统的动态特性。 kd 所在的微分环节能够将输入(r)与输出(y)的偏差 信号变化趋势实时地给体现出来。通过在一个修正量在 偏差变得过大之前将 kd 加入到系统里面,可提升控制 系统响应的速度,缩短调节时间。为了提升整个系统响 应速度,应设置较大的 kp 和较小的 kd 值。
3 MATLAB 仿真分析
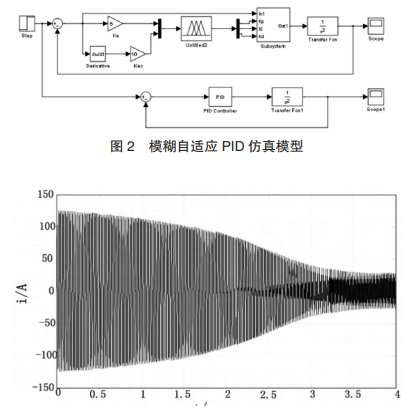
以 220kW、6kV 三相鼠笼式电机为研究对象,在 MATLAB 中建立模糊自适应 PID 仿真模型,并采用电 流闭环的限流控制,设置 ∆kp、∆kl 和 ∆kd 的模糊子集, 分别设为 {NB,NM,NS,ZO,PS,PM,PB},模糊 控制器的输出量的量化论域设为 [-1,1],比例因子为 1, 隶属度函数为高斯函数设 置 交流 电 频 率 为 50Hz, 电 机 的 额 定 电 流 为 32A, 定 子 绕 组 电 阻 为 1.83 欧 姆, 定 子 的 漏 感 为 0.0358H, 每 相 折 合 电 阻 为 3.71Ω, 折 合 漏 感 为 0.0358H,励磁电感为 0.9872H,电机的极对数为 2。电机启动时的最大电流为 122A, 启动电流随着时间光滑地减小,所以电机是平稳加速的, 在 3.8 秒左右电机定子电流迅速降低到额定电流值,电 机达到额定转速。仿真结果表明模糊自适应 PID 控制 能够很好地限制电机的启动电流。
3 结语
随着工程机械的不断发展,对异步电动机启动性 能要求也越来越高,自适应控制的控制过程的特点是它 可以随时修正自己的自身特性,运用到 PID 的控制中 来调整 PID 控制过程中的参数,能够使系统自适应对 系统的变化。模糊现象具有“亦此亦彼”的模糊性,通 过模糊控制器,可调整 ∆kp、∆kl 和 ∆kd 三个输出量, 从而可调整 PID 控制器中的 kp、kl 和 kd 参数。控制系 统响应的速度和调节的精度等控制指标与 kp 有关,通 过调节 kl 的大小可调整系统的稳态误差,调整 kd 可改 善控制系统的动态特性。根据参考文献 [3] 的实验数据 表明模糊自适应 PID 控制对电机的启动电流具有很好 的限制作用。



